|
bio_ik
MoveIt kinematics_base plugin based on particle optimization & GA
|
Protected Member Functions | |
| void | updateMimic (std::vector< double > &values) |
 Protected Member Functions inherited from bio_ik::RobotJointEvaluator Protected Member Functions inherited from bio_ik::RobotJointEvaluator | |
| const Frame & | getLinkFrame (const moveit::core::LinkModel *link_model) |
| bool | checkJointMoved (const moveit::core::JointModel *joint_model) |
| void | putJointCache (const moveit::core::JointModel *joint_model, const Frame &frame) |
| const Frame & | getJointFrame (const moveit::core::JointModel *joint_model) |
| void | getJointFrame (const moveit::core::JointModel *joint_model, const double *variables, Frame &frame) |
| void | getJointFrame (const moveit::core::JointModel *joint_model, const std::vector< double > &variables, Frame &frame) |
| RobotJointEvaluator (moveit::core::RobotModelConstPtr model) | |
Protected Attributes | |
| std::vector< std::string > | tip_names |
| std::vector< Frame > | tip_frames |
| std::vector< const moveit::core::LinkModel * > | tip_links |
| std::vector< const moveit::core::LinkModel * > | link_schedule |
| std::vector< Frame > | global_frames |
| std::vector< std::vector< const moveit::core::LinkModel * > > | link_chains |
| std::vector< size_t > | active_variables |
| std::vector< std::pair< size_t, size_t > > | variable_to_link_map |
| std::vector< size_t > | variable_to_link_map_2 |
| std::vector< std::pair< size_t, size_t > > | variable_to_link_chain_map |
| Protected Attributes inherited from bio_ik::RobotJointEvaluator | |
| std::vector< Vector3 > | joint_axis_list |
| moveit::core::RobotModelConstPtr | robot_model |
| std::vector< double > | variables |
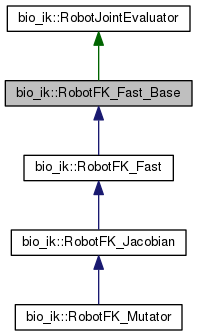
Definition at line 217 of file forward_kinematics.h.
 1.8.11
1.8.11

