|
TAMSVIZ
Visualization and annotation tool for ROS
|
Public Member Functions | |
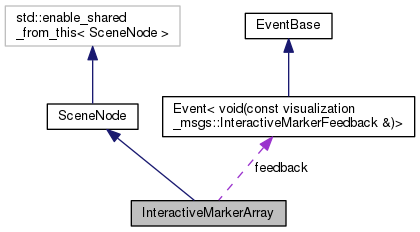
| InteractiveMarkerArray (const std::shared_ptr< InteractiveMarkerParameters > ¶ms) | |
| void | init (const visualization_msgs::InteractiveMarkerInit &message) |
| void | update (const visualization_msgs::InteractiveMarkerUpdate &message) |
| virtual void | renderSync (const RenderSyncContext &context) override |
| std::shared_ptr< InteractiveMarker > | marker (const std::string &name) |
 Public Member Functions inherited from SceneNode Public Member Functions inherited from SceneNode | |
| SceneNode (const SceneNode &)=delete | |
| SceneNode & | operator= (const SceneNode &)=delete |
| void | connect (const std::shared_ptr< SceneNode > &child) |
| void | renderSyncRecursive (const RenderSyncContext &context, SceneContext &scene_context) |
| virtual void | renderAsync (const RenderAsyncContext &context) |
| Eigen::Affine3d | renderPose () const |
| const Eigen::Affine3d & | framePose () const |
| virtual bool | pick (uint32_t id) const |
| virtual bool | interact (const Interaction &interaction) |
| const Frame & | frame () const |
| void | frame (const Frame &frame) |
| void | frame (const std::string &name) |
| void | pose (const Eigen::Isometry3d &pose) |
| void | pose (const Eigen::Affine3d &pose) |
| const Eigen::Affine3d & | pose () const |
| void | show () |
| void | hide () |
| bool | visible () const |
| bool | visible (bool v) |
| template<class T , class... Args> | |
| std::shared_ptr< T > | create (const Args &...args) |
Public Attributes | |
| Event< void(const visualization_msgs::InteractiveMarkerFeedback &)> | feedback |
Definition at line 73 of file interactive.h.
 1.8.11
1.8.11

